Les Essentiels d'ARVALIS - Quels sont les enjeux des systèmes de guidage assisté par GPS sur la conduite des cultures ?
Le guidage, ou l'autoguidage, assisté par GPS permet d’optimiser les passages dans la parcelle. Sa précision dépend de la correction utilisée à l’antenne et du type d’asservissement sur la direction du tracteur (aucun, moteur électrique ou hydraulique). En plus du confort, ils permettent de réduire les recouvrements de 13 % en travail du sol, 5 % en récolte de céréale et 2 % en semis ou pulvérisation/épandage.

L’objectif d’un guidage ou d’un autoguidage assisté par GPS est d’optimiser les passages d’un tracteur dans une parcelle pour minimiser les manques ou les recouvrements entre chaque aller-retour. Ils permettent :
- un gain de temps grâce à la suppression du jalonnage mais également à l’absence de recouvrement entre les passages,
- une réduction des intrants (semences, produits phytosanitaires, gasoil…) du fait de l’absence de recouvrement et donc un gain environnemental,
- un travail de même qualité quelles que soient les conditions : parcelle vallonnée, présence de brouillard, travail de nuit…
- confort,
- réduction de la fatigue pour l’autoguidage,
- plus de temps pour surveiller le travail de l’outil pour l’autoguidage.
La question est d’identifier les gains permis par les guidages assistés par GPS et par conséquent sa rentabilité.
► Comment ça marche ?
► Les références expérimentales ARVALIS
► Les préconisations d'ARVALIS
► Pour en savoir plus
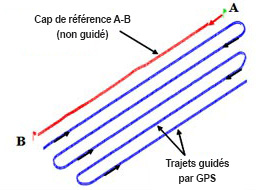
En entrant dans la parcelle, l’agriculteur enregistre le point de référence A (figure 1). Il se dirige vers l’autre extrémité de la parcelle, en travaillant ou non. Il enregistre le point de référence B. Le GPS trace une ligne virtuelle entre ces deux points. Le chauffeur saisit la largeur de travail de l’outil. Le système va tracer les parallèles à la ligne de référence et donner l’information au chauffeur pour le guider. Si c’est un autoguidage le tracteur va suivre la ligne en fonction des informations données par le GPS. Sa performance va dépendre de deux facteurs : la précision de la correction utilisée à l’antenne et le type d’asservissement sur la direction.
Figure 1 : Schéma de programmation d’un système de guidage
Les corrections permettent d’améliorer la précision du tracteur dans la parcelle. Des tests réalisés sur Boigneville permettent d’identifier trois catégories :
• les corrections décimétrique composées d’Egnos de l’ESA (Agence Spatiale Européenne), du SF1 de John Deere et du RTX Range Point de Trimble. Les deux dernières ont une précision relative de ±20-25 cm à 20 min et de ±10 cm à 5 min. Egnos est moins précise : ±60 cm à 20 min et de ±30 cm à 5 min. Ces corrections doivent être utilisées sur des interventions rapides et de grandes largeurs (épandage, pulvérisation, …) .
• Le second groupe est de niveau centimétrique sans retour au même endroit. Il concerne des corrections sous abonnement (jusqu’à 1400 €/an) : SF2 de John Deere, HP-G2 d’OmniSTAR et le RTX Center Point de Trimble. Elles ont une précision moyenne de ±3 cm (et de ±6-7 cm dans 95% du temps) entre des passages à 20 min sous condition d’attendre un temps de chauffe d’environ 30 min.
• les corrections RTK permettent une précision de ±2 cm à 15 mn qu’elles soient transmises par radio (base RTK dans un rayon de 10 km et de la même marque que l’autoguidage) ou par téléphonie mobile (réseau Orphéon, Sat-Info ou Teria). La précision est acquise instantanément. Il est possible de revenir au même endroit, à la précision du signal prêt.
Le second facteur qui affecte la précision d’un guidage ou autoguidage est le type d’asservissement. Les barres de guidage n’ont pas d’asservissement. C’est le chauffeur qui tourne le volant. Au niveau des autoguidages, le GPS gère tout seul la trajectoire du tracteur via le circuit hydraulique ou un moteur électrique. Lorsque l’asservissement est directement pris sur l’hydraulique, le dispositif n’est plus déplaçable. Par contre, en cabine il n’y a aucune gêne. L’asservissement hydraulique peut être installé d’usine ou a posteriori. Dans le cas du moteur électrique, il est déplaçable d’un matériel à l’autre et peut être rentabilisé sur l’ensemble des interventions culturales. Les moteurs électriques se présentent sous différentes formes :
• une molette vient agripper le volant (Trimble, Innov.GPS…)
• l’ensemble du volant existant est remplacé (John Deere, Trimble, Topcon, …)
• une crémaillère vient emprisonner le volant existant (Autofarm, Raven, …)
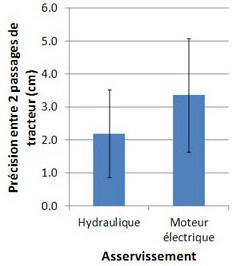
Sur les semis réalisés avec un autoguidage RTK (± 2cm à l’antenne), la précision est en moyenne deux fois supérieure avec un asservissement hydraulique (figure 2) : ±2 cm contre ±3,5 cm en RTK avec un moteur électrique. Cette différence provient, entre autre, du paramétrage de ce moteur et de son temps de réaction
Figure 2 : Précision avec un autoguidage RTK

L’autoguidage permet d’optimiser la largeur de travail

Moteur électrique « intégral »

Moteur électrique à molette
Les corrections décimétriques sont sur les barres de guidage. Elles doivent être utilisées sur des interventions rapides pour limiter le cumul des erreurs dans la parcelle, c'est-à-dire de l’épandage/pulvérisation ou des opérations de travail du sol. Avec un autoguidage, la précision est améliorée car il n’y a pas le temps de réaction du chauffeur.
Les deux autres groupes de corrections doivent être utilisées avec un autoguidage. Les corrections centimètrique sans retour seront utilisées pour des interventions plus lentes qui ne nécessitent pas de revenir exactement au même endroit comme du semis. Les corrections RTK, qui permettent de revenir au même endroit, pourront être valorisées pour des opérations de binage mécanique ou de strip-till. Plus l’intervention devra être précise et plus il faudra basculer d’un moteur électrique vers un asservissement hydraulique.
Sources documentaires
- Desbourdes Caroline, Bureau Sylvain « Guidage par satellite. Corrections par téléphone : leur intérêt dépend de leur disponibilité » - Perspectives Agricoles N°398 - mars 2013 (p.16-20).
- Desbourdes Caroline « Binage mécanique sur maïs. Un autoguidage RTK pour une intervention de haute précision » - Perspectives Agricoles N°386 - février 2012 (p.14-16).
- Desbourdes Caroline « Autoguidage. De la précision en plus avec le RTK » - Perspectives Agricoles N°376 - mars 2011 (p.18-20).
-

Numérique et agriculture : découvrez les résultats de trois ans d’essais en région Grand-Est Gestion des couverts permanents, pâturage tournant, précision GPS, désherbage ciblé...
-

Pulvérisation ciblée : des investissements compensés par les économies d’herbicides Malgré des économies d’herbicides à la clé, la pulvérisation ciblée est-elle rentable au...
-

Alternatives au glyphosate - Le désherbage électrique, une piste sans travail du sol prometteuse Depuis 2018, ARVALIS teste le désherbage électrique comme alternative au glyphosate et...
-

Vidéo - L’innovation en irrigation pour une meilleure utilisation de l’eau Bien gérer son irrigation, c’est préserver les ressources hydriques en mettant en relation...






Réagissez !
Merci de vous connecter pour commenter cet article.